

see kood juhib robotit, mis lubab talle liikuda , vältida takistusi, kui see liiga lähedale jõuab takistuse juurde, liikuv robot kordab seda käitumist pidevalt. See kasutab ultraheliandureid, et tuvastada takistused ja reageerida vastavalt
int ping(){ //CHECK DISTANCE FUNCTION (3x)
digitalWrite(trigPin, 0);
delayMicroseconds(2);
digitalWrite(trigPin, 1);
delayMicroseconds(10);
digitalWrite(trigPin, 0);
duration = pulseIn(echoPin, 1);
distance = duration/58;
dist_check1 = distance;
digitalWrite(trigPin, 0);
delayMicroseconds(2);
digitalWrite(trigPin, 1);
delayMicroseconds(10);
digitalWrite(trigPin, 0);
duration = pulseIn(echoPin, 1);
distance = duration/58;
dist_check2 = distance;
digitalWrite(trigPin, 0);
delayMicroseconds(2);
digitalWrite(trigPin, 1);
delayMicroseconds(10);
digitalWrite(trigPin, 0);
duration = pulseIn(echoPin, 1);
distance = duration/58;
dist_check3 = distance;
int dist_check_sum;
dist_check_sum = dist_check1 + dist_check2 + dist_check3;
dist_result = dist_check_sum/3;
return dist_result;
}
void motors_forward(){ //MOTORS FORWARD FUNCTION
analogWrite(mot1f, mot_speed);
analogWrite(mot2f, mot_speed);
digitalWrite(mot1b, 0);
digitalWrite(mot2b, 0);
}
void motors_back(){ //MOTORS BACK FUNCTION
digitalWrite(mot1f, 0);
digitalWrite(mot2f, 0);
analogWrite(mot1b, mot_speed);
analogWrite(mot2b, mot_speed);
}
void motors_stop() { //MOTORS STOP FUNCTION
digitalWrite(mot1f, 1);
digitalWrite(mot2f, 1);
digitalWrite(mot1b, 1);
digitalWrite(mot2b, 1);
}
void motors_left() { //MOTORS LEFT FUNCTION
analogWrite(mot1f, mot_speed);
digitalWrite(mot2f, 0);
digitalWrite(mot1b, 0);
analogWrite(mot2b, mot_speed);
}
void motors_right() { //MOTORS RIGHT FUNCTION
digitalWrite(mot1f, 0);
analogWrite(mot2f, mot_speed);
analogWrite(mot1b, mot_speed);
digitalWrite(mot2b, 0);
}
void motors_foward_left() { //FORWARD LEFT FUNCTION
k = mot_speed*0.8;
analogWrite(mot1f, mot_speed);
analogWrite(mot2f, k);
digitalWrite(mot1b, 0);
digitalWrite(mot2b, 0);
}
void motors_foward_right() { //FORWARD RIGHT FUNCTION
k = mot_speed*0.8;
analogWrite(mot1f, k);
analogWrite(mot2f, mot_speed);
analogWrite(mot1b, 0);
analogWrite(mot2b, 0);
}
void motors_back_left() { //BACK LEFT FUNCTION
k = mot_speed*0.8;
digitalWrite(mot1f, 0);
digitalWrite(mot2f, 0);
analogWrite(mot1b, k);
analogWrite(mot2b, mot_speed);
}
void motors_back_right() { //BACK RIGHT FUNCTION
k = mot_speed*0.8;
digitalWrite(mot1f, 0);
digitalWrite(mot2f, 0);
analogWrite(mot1b, mot_speed);
analogWrite(mot2b, k);
}
allikas: https://moodle.edu.ee/mod/assign/view.php?id=1949207
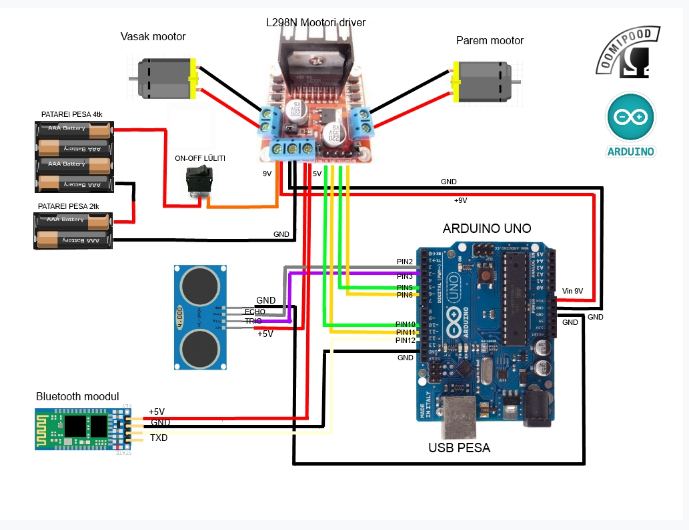
Skeem:
katset 10.30.23