

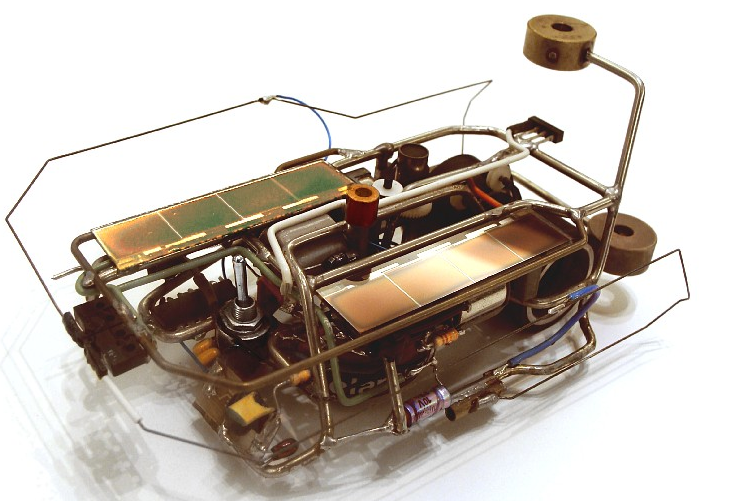
Solarover 1.0 kujunes eksperimentaalseks projektiks, mille eesmärk oli uurida ringlussevõetud komponentide abil valgusjõulise, valgustundliku autonoomse kulguri ehitamise teostatavust. Samal ajal toimis see katsena, et jälgida, kuidas tolm selle pinnale koguneb.
1.2 Autor, loomise kuupäev:
10. november 1989 Mark W. Tilden, Waterloo ülikool Kanadas.
2. Tööpõhimõte:
Kui valgus tabab sellise roboti ühte fotosensorit, lülitub sisse andurile vastav elektrimootor ja robot pöördub valguse poole, kuni tuli valgustab mõlemat fotosensorit ja teine mootor lülitub sisse. Kui mõlemad andurid on valgustatud, liigub robot valgusallika poole. Kui üks anduritest lakkab valgustumast, pöördub robot uuesti valgusallika poole ja olles jõudnud asendisse, kus valgus langeb mõlemale andurile, jätkab liikumist valgusesse. Kui valgus lakkab fotosensoritele langemast, peatub robot.
2.1
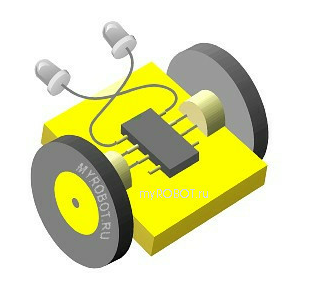
Sellel pildil näeme kahte fotosensorit, mis muudavad valguse elektrisignaaliks. Seega ilmub mootori draiveri (L239D) mikroskeemi INPUT1 sisendisse positiivne signaal.
1.
2.
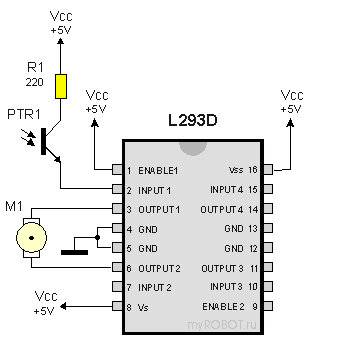
5V – positiivne poolus
GND – toiteallika negatiivne poolus
PTR1 – fototakisti
R1 – takisti
M1 – mootor
3.Takisti:

Fototransistori läbiva voolu kompenseerimiseks sisestatakse ahelasse takisti R1, mille nimiväärtuseks saab valida umbes 200 oomi. Takistil on stabiilne pingetase, kui takistus väheneb valguse mõjul. Kui takisti takistus on suur, siis reageerib robot ainult väga eredale valgusele, kui – väike, siis on tundlikkus suurem. Igal juhul ei tohiks fototransistori kaitsmiseks ülekuumenemise ja rikke eest kasutada takistit, mille takistus on alla 100 oomi.
4. Skeem:
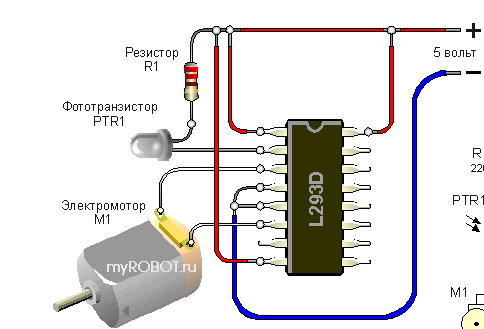
Robotiahela tööpõhimõte on väga lihtne. Kui valguskiir langeb fototransistorile PTR1, ilmub INPUT1 mootori draiveri kiibi sisendisse positiivne signaal. Kui fototransistor lõpetab valgustamise, kaob signaal sisendi INPUT1 juurest, mootor lõpetab pöörlemise ja robot peatub.
3. Loomise eesmärk:
BEAM (bioloogia, elektroonika, esteetika, mehaanika) robootika on ainulaadne lähenemine robotite projekteerimisele ja ehitamisele, mis ammutab inspiratsiooni looduslikest ning keskendub lihtsusele, tõhususele ja autonoomiale.
- Bioloogiliste põhimõtete uurimine
- Lihtsus ja minimalism
- Energiatõhusus Õppimine ja haridus
- Autonoomne käitumine
- Lõbus
4. Kasutamine:
Uurimine : BEAM-roboteid saab kasutada teaduslikes uuringutes ja uurimisprojektides, mis nõuavad loomuliku käitumise jäljendamist. Näiteks võidakse neid kasutada loomade liikumise, käitumise või ökoloogilise koostoime uurimiseks kontrollitud keskkondades.
4.1 Edasiarendus:
- Käitumise keerukus: BEAM-roboteid saab välja töötada, et jäljendada elusorganismides täheldatud keerukamat ja nüansirikkamat käitumist.
- Energiatõhusus: BEAM-roboteid saab energiatõhususe tagamiseks veelgi optimeerida, integreerides täiustatud energia kogumise tehnikaid.
- Tehisintellekt: tehisintellekti (AI) tehnikate integreerimine võib parandada robotite võimet oma keskkonnast õppida.
5.
5. Plussid ja miinused:
Plussid:
- Energiasäästlik: autonoomne töö võimalus päikesevalguse eest.
- Lihtsus: saab valmistada kasutatud osadest.
- Autonoomia: suudab näidata realistlikku käitumist ilma sügava programmeerimiseta
Miinused:
- Piiratud funktsionaalsus: BEAM-robotid ei ole reeglina väga mitmekülgsed.
- Aeglane liikumine: BEAM-robotid ei suuda sageli täpselt ja kiiresti liikuda.
6.Järeldus:
Kokkuvõteks võib öelda, et kiirrobotid pakuvad paeluvat ja kuluefektiivset võimalust lihtsate, energiasäästlike ja iseseisvalt toimivate robotite loomiseks. Kuigi nad paistavad silma teatud olukordades, ei pruugi need olla parim valik ülesannete puhul, mis nõuavad kõrgemaid võimeid või täpsemat täpsust.
Link video BEAM solar robot:
(991) The ‘wanna be’ Miniball – BEAM robot by Solarbotics – YouTube
Allikat:
20 Years of BEAM Technology – Solarbotics Ltd.
What are the pros and cons of beam robots? – Quo
СДЕЛАТЬ РОБОТА :: ПРОСТЕЙШИЙ РОБОТ НА ОДНОЙ МИКРОСХЕМЕ (myrobot.ru)