


1.History:
Certainly, here’s a modified version of your text:
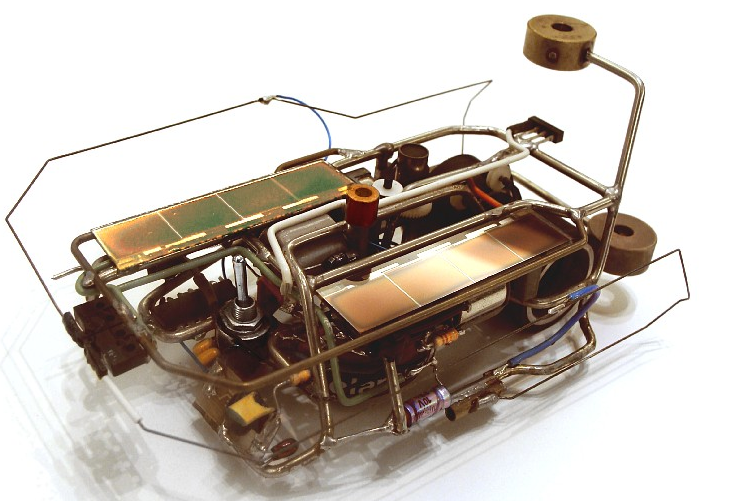
“Solarover 1.0 emerged as an experimental project aimed at exploring the feasibility of constructing a light-powered, light-responsive autonomous rover using recycled components. Simultaneously, it served as an experiment to observe how dust would accumulate on its surface.”
1.2 Author, Creation Date:
November 10, 1989 Mark W. Tilden, university Waterloo Canada.
2. Principle of operation:
When light hits one of the photosensors of such a robot, an electric motor corresponding to the sensor turns on and the robot turns towards the light until the light illuminates both photosensors and the second motor turns on. When both sensors are illuminated, the robot moves towards the light source. If one of the sensors ceases to be illuminated, the robot again turns towards the light source and, having reached a position at which light falls on both sensors, continues its movement into the light. If the light stops falling on the photosensors, the robot stops.
2.1
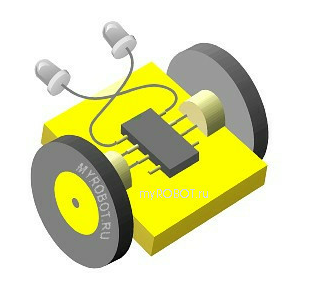
On this picture we can see two photosensors which convert light into an electrical signal. Thus, a positive signal will appear at the input of the INPUT1 microcircuit of the engine driver(L239D).
1.external:
2. Internal:
5V – positive pole
GND – negative pole of power supply
PTR1 – photoresistor
R1 – Resistor
M1 – motor
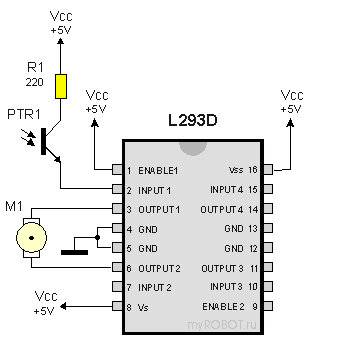
3. Resistor:

To compensate for the current passing through the phototransistor, a resistor R1 is introduced into the circuit, the nominal value of which can be selected about 200 ohms. The resistor has a stable voltage level when the resistance decreases due to exposure to light. If the resistance of the resistor is large, then the robot will respond only to very bright light, if – small, then the sensitivity will be higher. In any case, a resistor with a resistance of less than 100 ohms should not be used to protect the phototransistor from overheating and failure.
4. Scheme:
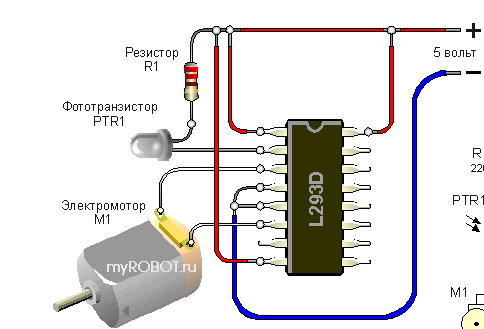
The principle of operation of the robot circuit is very simple. When a beam of light falls on the phototransistor PTR1, a positive signal will appear at the input of INPUT1 engine driver chip. When the phototransistor stops illuminating, the signal at the INPUT1 input disappears, the motor stops rotating and the robot stops.
3. Purpose of creation:
BEAM (Biology, Electronics, Aesthetics, Mechanics) robotics is a unique approach to designing and building robots that draws inspiration from natural systems and focuses on simplicity, efficiency, and autonomy.
- Exploring Biological Principles
- Simplicity and Minimalism
- Energy Efficiency
- Learning and Education
- Autonomous Behaviors
- Fun
4. Use:
Research and Exploration: BEAM robots can be employed in scientific research and exploration projects that require the emulation of natural behaviors. For example, they might be used to study animal locomotion, behavior, or ecological interactions in controlled environments.
4. Further development:
1.Behavior Complexity: BEAM robots could be developed to mimic more intricate and nuanced behaviors observed in living organisms.
2. Energy Efficiency: BEAM robots could be further optimized for energy efficiency by integrating advanced energy-harvesting techniques.
3. Artificial Intelligence: Integrating artificial intelligence (AI) techniques could enhance the robots’ ability to learn from their environment.
5. Pros and cons:
1.Pros:
- Energy-Efficient: possibility of autonomous operation from sunlight.
- Simplicity: can be made from used parts.
- Autonomy: able to show realistic behavior without deep programming
2.Cons:
- Limited Functionality: as rule BEAM robots have not a wide range of versatility.
- Slow movement: BEAM robots often have not ability to move precise and rapid.
6.Conclusion:
To sum it up, beam robots present a captivating and economical method for creating uncomplicated, energy-savvy, and self-sufficient robots. Although they shine in certain scenarios, they might not be the most suitable option for tasks demanding advanced capabilities or pinpoint accuracy.
sources:
20 Years of BEAM Technology – Solarbotics Ltd.
What are the pros and cons of beam robots? – Quo
СДЕЛАТЬ РОБОТА :: ПРОСТЕЙШИЙ РОБОТ НА ОДНОЙ МИКРОСХЕМЕ (myrobot.ru)